Lecture Notes 2: Intelligent Agent
Agent and Environment
An agent is any entities that percept the environment through sensors and act using actuator based on the environment

percept sequence is the complete history that an agent has perceived
How about calculator?
Good Behaviour of an Agent
Performance Measures
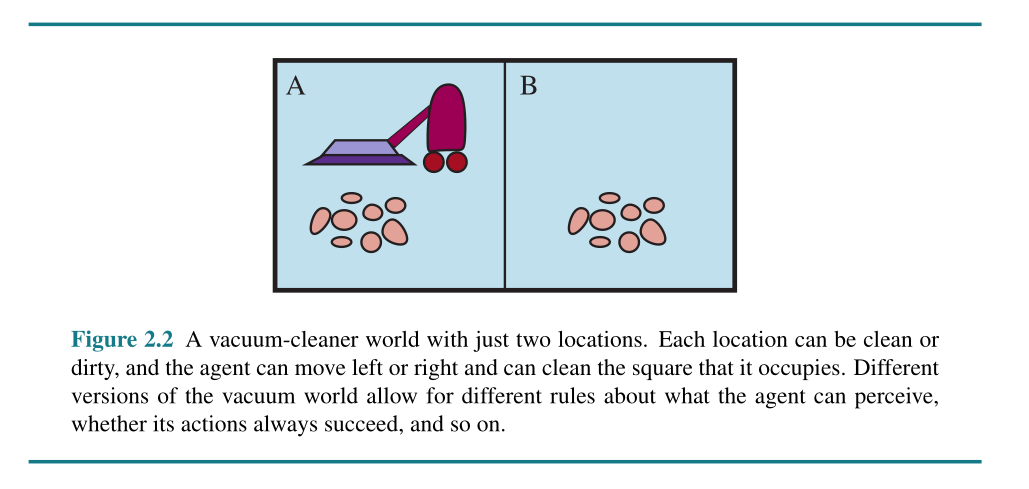
What supposed to be the good performance measures for vacuum cleaner?
The amount of dirt sucked? Is there a problem with this measure?
“As a general rule, it is better to design performance measures according to what one actually wants to be achieved in the environment, rather than according to how one thinks the agent should behave”
Rationality
Rationale at any given time depends on several points:
- The performance measure that defines the criterion of success.
- The agent’s prior knowledge of the environment.
- The actions that the agent can perform.
- The agent’s percept sequence to date.
The definition of rationale agent:
“For each possible percept sequence, a rational agent should select an action that is expected to maximize its performance measure, given the evidence provided by the percept sequence and whatever built-in knowledge the agent has.”
Is the simple vacuum-cleaner agent rationale?
Omniscience, Learning, and Autonomy
Omniscient for an agent is impossible in reality.
Example: Walking on the road to say hello to an old friend across the street
Rationality \(\neq\) Perfection
Don’t you think being aware of unknown is beneficial? Open-World Lifelong Learning?
The Nature of Environment
In order to create a rationale agent, Performance, Environment, Actuators, and Sensors need to be specified.
| Agent Type | Performance Measure | Environment | Actuators | |
|---|---|---|---|---|
| Taxi driver | Safe, fast, legal, comfortable trip, maximize profits, minimize impact on other road users. | Roads, other traffic, police, pedestarians, customers, weather. | Steering, accelerator, brake, signal, horn, display, speech. | Cameras, radar, speedometer, GPS, engine, sensors, accelerometer, microphones, touchscreen. |
| Medical diagnosis system | Healthy patient, reduced costs | patient, hospital, staff | Display of questions, tests, diagnoses, treatments. | Touchscreen/voice entry of symptoms and finding |
| Interactive Programming Tutor? | ??? | ??? | ??? | ??? |
Properties of Task Environment
- Fully observable vs partially observable
- Single-agent vs multiagent
- Deterministic vs nondeterministic, stochastic?
- Episodic vs sequential
- Static vs dynamic, semidynamic?
- Discrete vs continuous
- Known vs unknown
| Task environment | Observable | Agents | Deterministic | Episodic | Static | Discrete |
|---|---|---|---|---|---|---|
| Crossword puzzle | Fully | Single | Deterministic | Sequential | Static | Discrete |
| Chess with a clock | Fully | Multi | Deterministic | Sequential | Semi | Discrete |
| Taxi driving | Partially | Multi | Stochastic | Sequential | Dynamic | Continuous |
| Interactive Programming Tutor? | ??? | ??? | ??? | ??? | ??? | ??? |
The Structure of an Agent
“The job of AI is to design an agent program that implements an agent function”
With the assumption that AI will run on a device with actuator and sensor, the agent architecture is
agent = architecture + program
function TABLE-DRIVEN-AGENT(percept) returns an action
persistent: percepts, a sequence, initially empty
table, a table of actions, indexed by percept sequences, initially fully specified
append percept to the end of percepts
action ← LOOKUP(percepts, table)
return action
The size of lookup table will be:
\[\sum_{t=1}^T= |P|^t\]Where \(P\) is all possible percepts in a set and \(T\) is the lifetime of an agent.
Automated taxi driver with 8 cameras:
- 70 megabytes per second (30 frames per second, 1080 × 720 pixels with 24 bits of color information)
- yielding a lookup table with over \(10^{600,000,000,000}\) entries for an hour’s driving
-
compared to the number of atoms in the observable universe is less than \(10^{80}\)
- (a) no physical agent in this universe will have the space to store the table;
- (b) the designer would not have time to create the table;
- and (c) no agent could ever learn all the right table entries from its experience.
“The key challenge for AI is to find out how to write programs that, to the extent possible, produce rational behavior from a smallish program rather than from a vast table”
“four basic kinds of agent programs that embody the principles underlying almost all intelligent systems: Simple reflex agents; Model-based reflex agents; Goal-based agents; and Utility-based agents”
Simple Reflex Agents
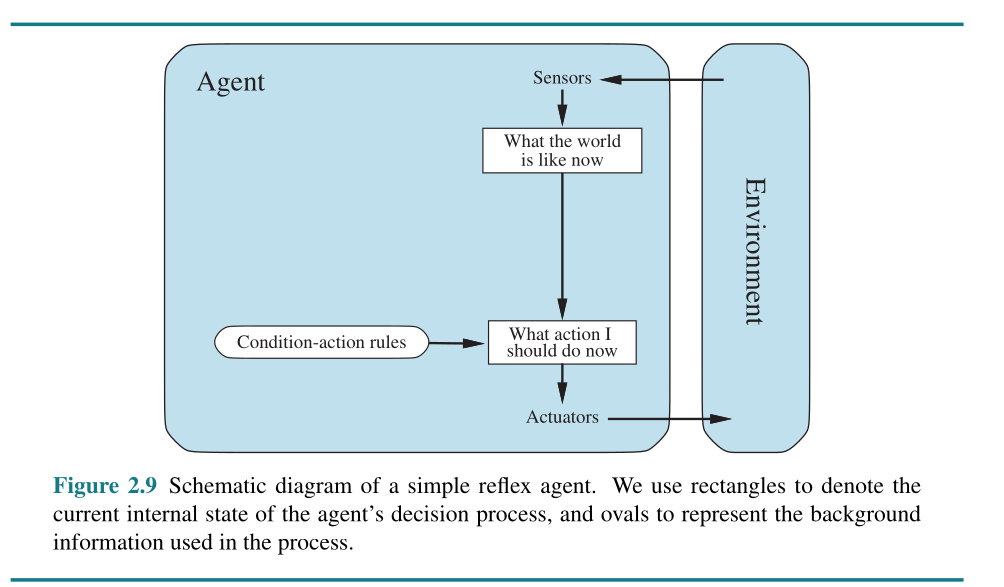
Source: (Russel and Norvig, 2022)
function REFLEX-VACUUM-AGENT([location,status]) returns an action
if status = Dirty then return Suck
else if location = A then return Right
else if location = B then return Left
function SIMPLE-REFLEX-AGENT(percept) returns an action
persistent: rules, a set of condition–action rules
state ← INTERPRET-INPUT(percept)
rule ← RULE-MATCH(state, rules)
action ← rule.ACTION
return action
Model-based Reflex Agents
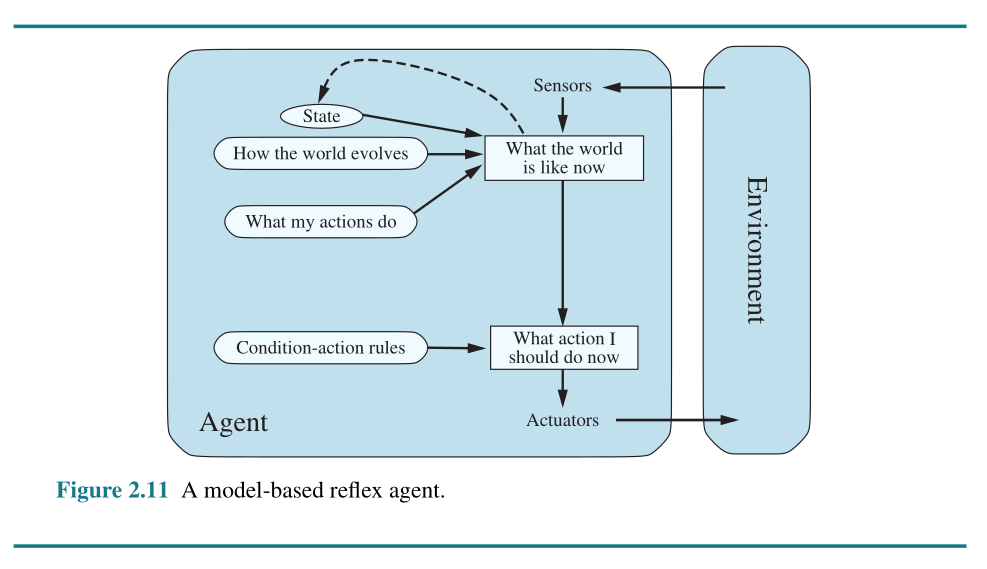
function MODEL-BASED-REFLEX-AGENT(percept) returns an action
persistent: state, the agent’s current conception of the world state
transition model, a description of how the next state depends on the current state and action
sensor model, a description of how the current world state is reflected in the agent’s percepts
rules, a set of condition–action rules
action, the most recent action, initially none
state ← UPDATE-STATE(state, action, percept, transition model, sensor model)
rule ← RULE-MATCH(state, rules)
action ← rule.ACTION
return action
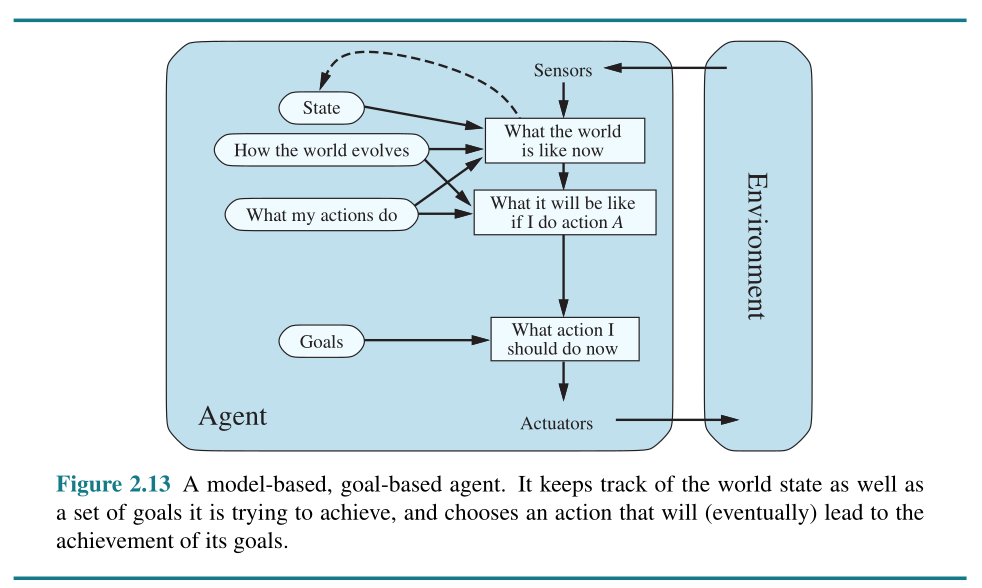
Goal-based Agents
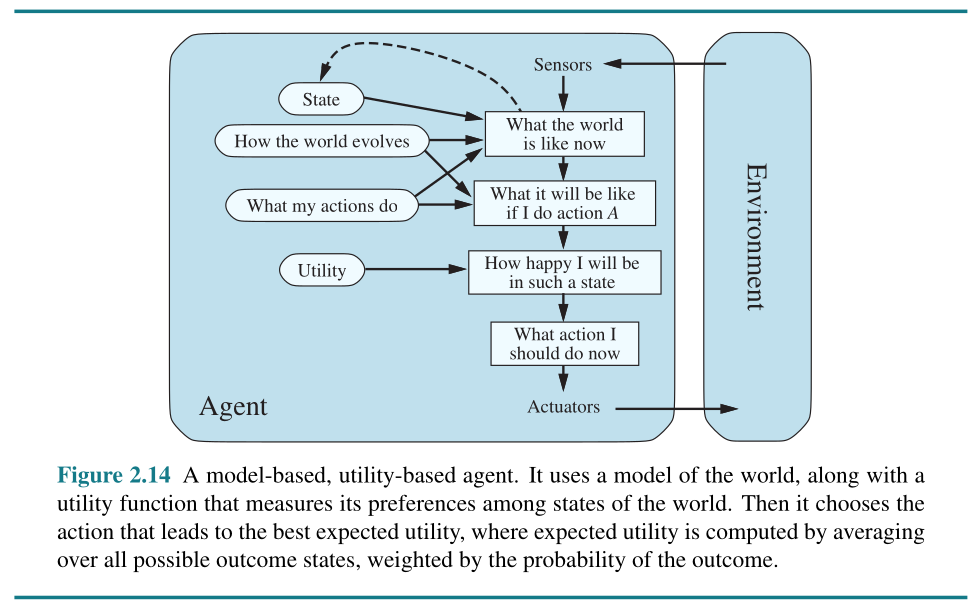
Utility-based Agents
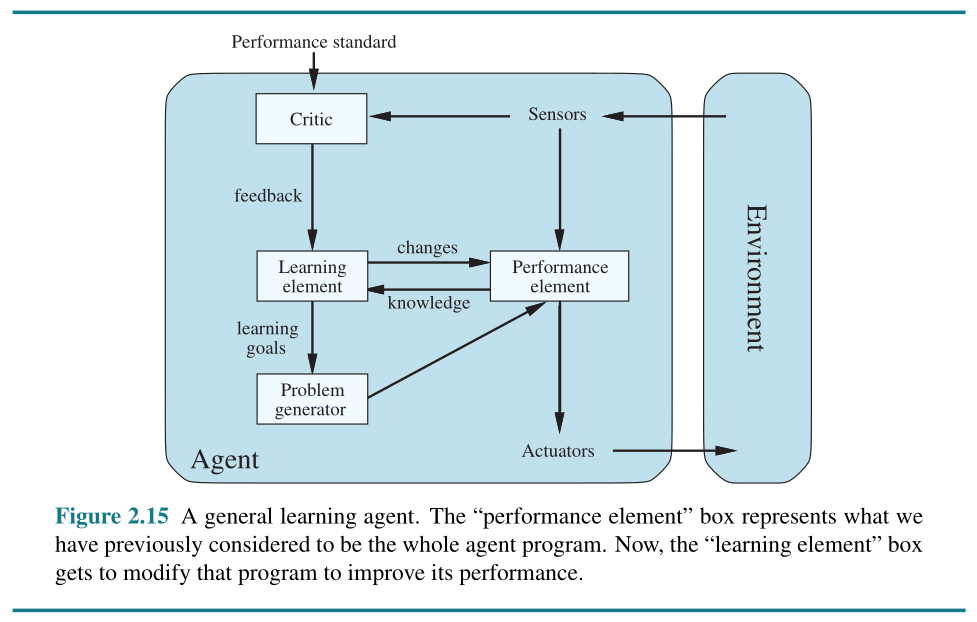
Learning Agents
Assignment
Please specify the PEAS (Performance, Environment, Actuators, and Sensors) of the AI agent provided below as well as the properties of the environment. Describe each specification that you justify.
Then, specify the different structure of the agents based on your choice of AI agents. Please describe Goal-based agent, Utility-based agent, and Learning agents for your topic.
Please submit next week on LMS week 2, before 17 September 2025!
Automatic plant species identification through mobile device
The users can use their mobile phone to take a picture of plant in any environment and the agent can predict what species it is with the relevant information. The agent can provide unidentified species if the species is not available in the agent knowledge.
Chatbot for Academic Information in University
The students in university can ask/query for retrieving relevant information. For example when discussing about the timeline of academic calender, querying about when the final proposal can be submitted, or any other academic information like how to write the proposal or final projects.
Automatic Biodiversity Monitoring using Camera sensors
The camera can capture different living species on an environment and map the biodiversity level in that environment along with the number of species found in that area. The system can provide information about low, medium, or high biodiversiy along with the availability of the invasive species.
Focused Web Crawler for Academic Journal
The users can query about the topic of journal (e.g. “kecerdasan buatan untuk chatbot”) that return a list of clickable journal that related to the topic. The user can leave the bot for several ours or even days, and the users will receive the collected relevant journals.